
2019年10月25日
モータドライバのPWM制御 SM方式とLAP方式の特徴と実装

ブラシ付きDCモータドライバでは、2種類のPWM制御がよく使われます。
- Sign Magnitude(SM) または Sign/Magnitude/Break(SMB)
- Locked Anti-Phase(LAP)
この記事では、2種類の方法の原理・特徴とPololu G2ハイパワーモータドライバを使った実装例を紹介します。
SM方式とLAP方式の違い
| SM方式 | LAP方式 | |
|---|---|---|
| 制御線 | 2線(速度・回転方向) | 1線 |
| 制御性 | 普通 | 良い |
| 消費電流 | 小さい | 大きい |
SM方式は、回転時のみ制御する方式のため省電力です。モータ制御とくに停止動作は、停止時にモータへ電流を流さないため、ブレーキや回転開始時のトルクが弱い部分があります。
LAP方式は、常にモータへ電流を流し制御する方式のため消費電流が大きくなります。モータ制御は、停止時やモータ回転開始時の制御に優れており、モータのトルクを十分に活かせる特徴があります。
Sign Magnitude
原理
SM方式は、モータの正転/逆転とショートブレーキを繰り返すことによって制御します。正転か逆転のどちらにするかの符号(Sign)と、その平均電圧の大きさ(Magnitude)によって制御します。
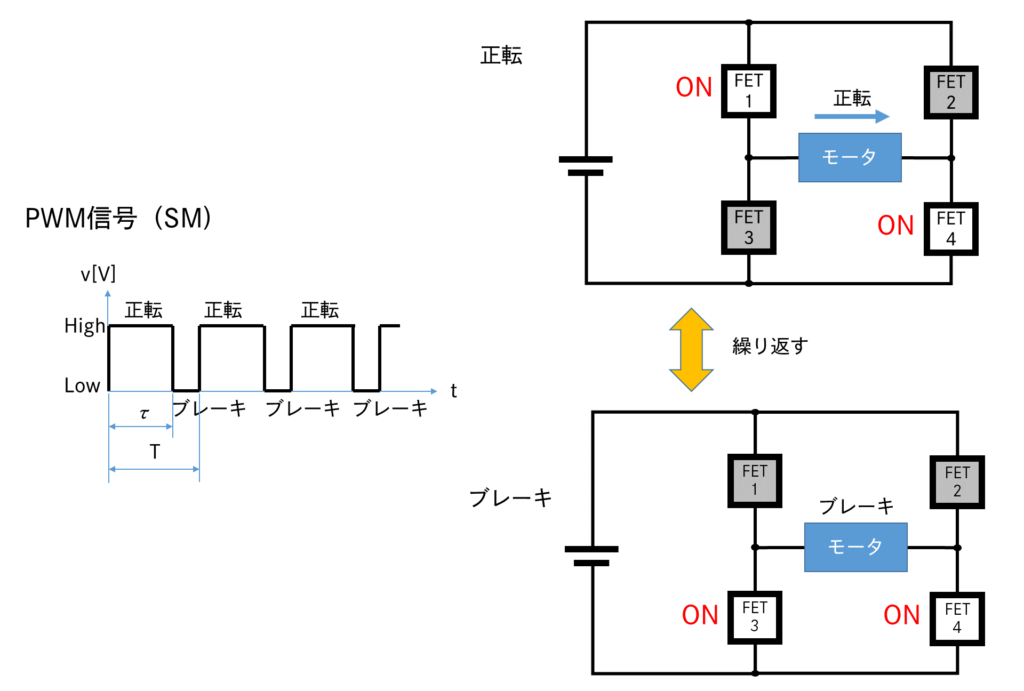
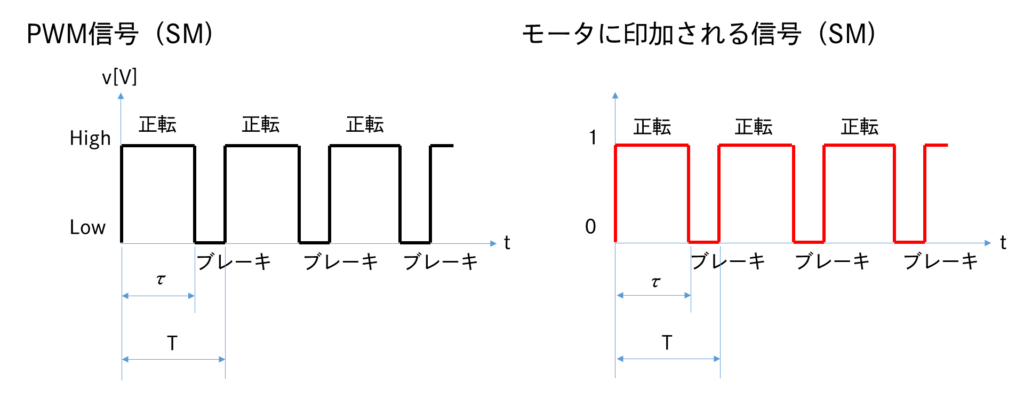
モータに入力される信号は電圧を加えるか加えないかの2種類の状態(1と0)の繰り返しです。
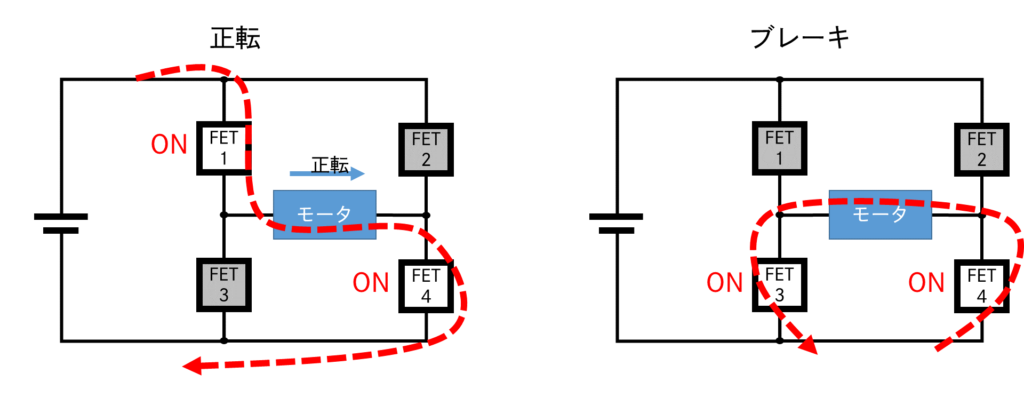
電流はつぎの図のように流れます。ショートブレーキの場合はモータが慣性で回転している方向と逆方向に電流が流れます。
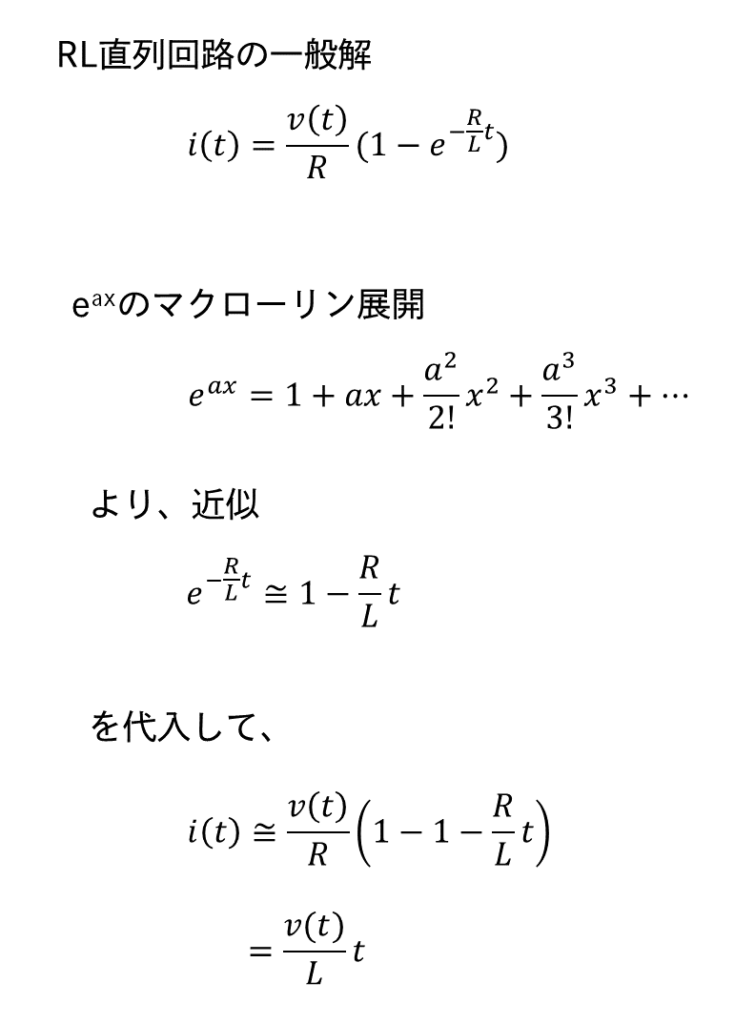
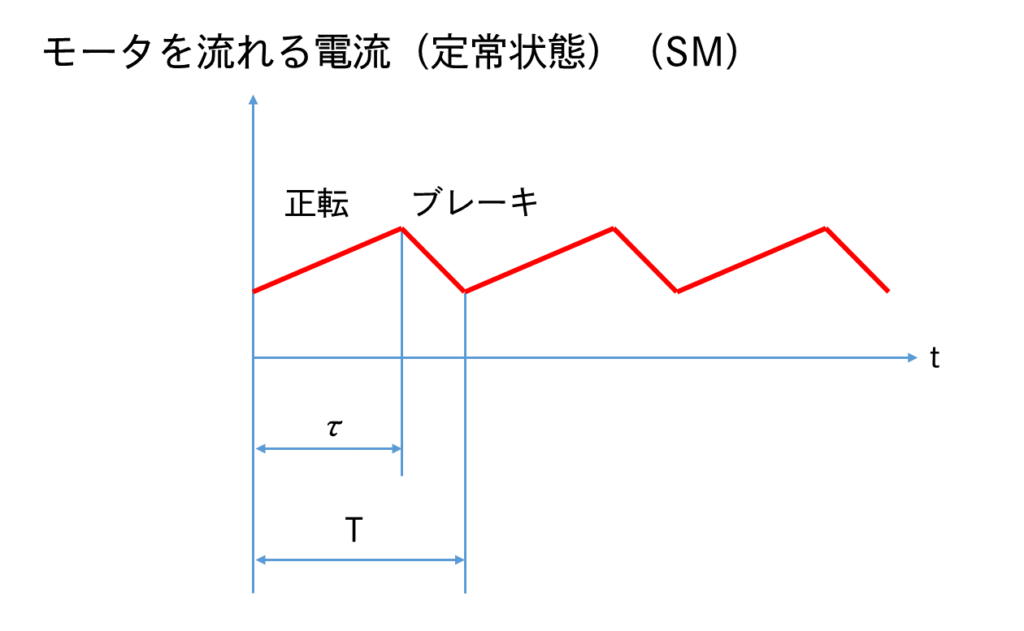
つぎの図は、正転と逆転の変化がない状態(定常状態)で正転しているモータに流れる電流の変化を表しています。モータには、ほぼ線形で変化する電流が流れます。
モータはRL直列回路に置き換えられます。RL直列回路は、電圧の周波数が十分に高ければ、電流の変化率は\(\frac{V}{L}\)です。
バッテリ電圧\(V_b\)、逆起電力\(V_m\)、モータのインダクタンス\(L_m\)とすると、電流の変化率は\(\frac{V_b-V_m}{L_m}\)です。
モータに負荷をかけていない状態では、逆起電力\(V_m\)はバッテリ電圧\(V_b\)とほぼ等しいため、電流の変化は小さくなります。一方、モータに負荷をかけ、停止すると逆起電力\(V_m\)が0になり、電流の変化の割合は\(\frac{V_b}{L_m}\)となり、大きく変化します。
モータが正転している状態から、急に逆転すると、\(V_m\)が\(-V_b\)となり、電流の変化が最大となります。
特徴
ブレーキの間は電源から電流が流れないため省電力です。しかし、ショートブレーキはあまりトルクを出せないため、回転しているモータを止めるには時間がかかります。そのため、制御性がよくありません。
PWM制御というとSM方式を使用するのが一般的です。
Locked Anti-Phase
原理
LAP方は、正転と逆転の繰り返しによってモータを制御します。PWMのデューティ比により正転と逆転の比率を変えることによって制御します。デューティ比が50%のときに停止となります。ショートブレーキを使用しません。
Hブリッジの4つのFETすべてを各サイクルでオン/オフします。駆動するFETのペアは対角で固定です(Locked)。常に反対方向に駆動され、お互いに逆位相(Anti-Phase)になっています。
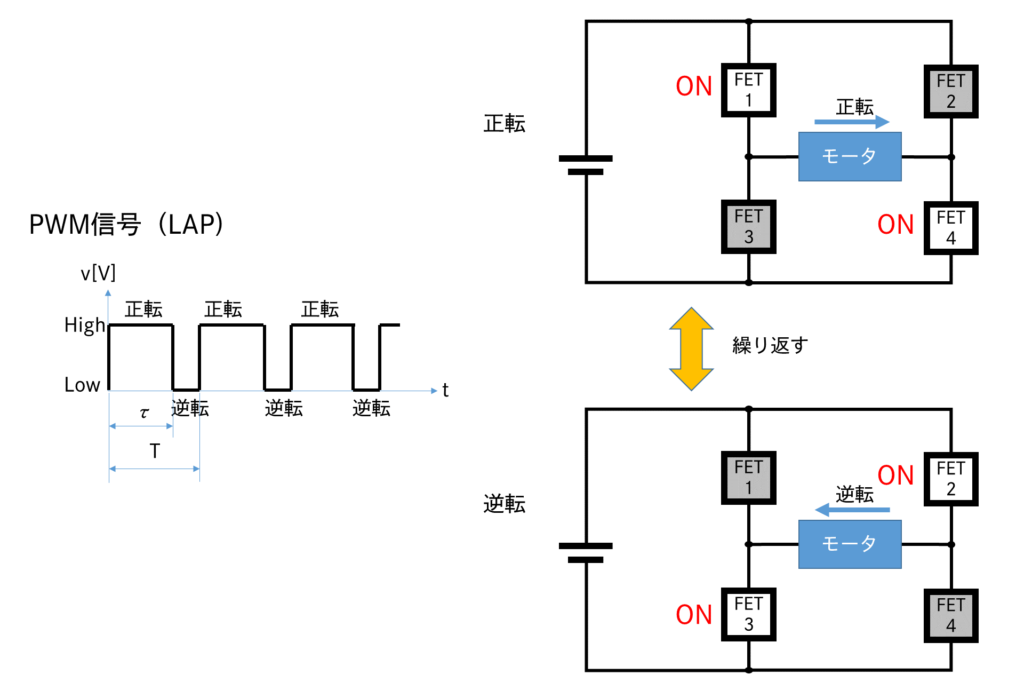
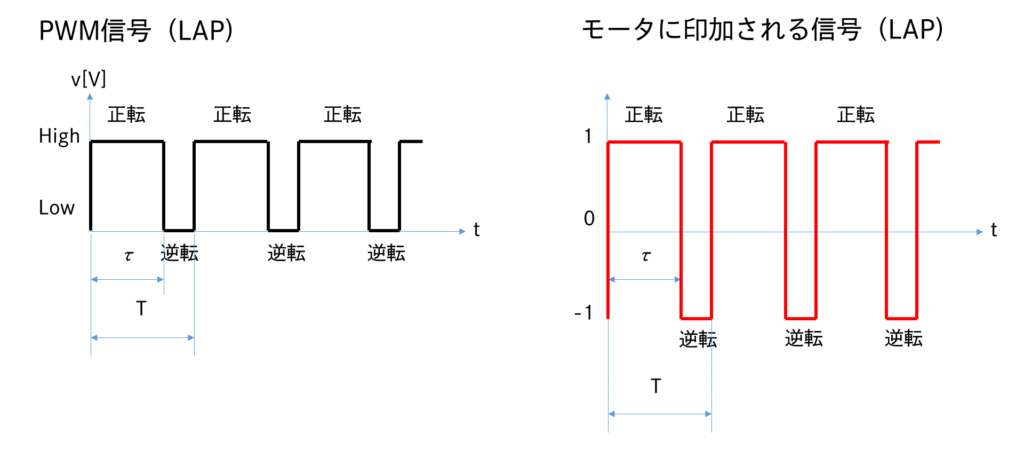
モータに入力される信号は正転と逆転の2種類の状態(1と-1)の繰り返しです。
モータの動作は、正転と逆転を繰り返すのではなく、電流連続モードとなる高速なPWMで制御することで、一定の方向または停止となるように制御されます。電流連続モードを実現するため、入力の制御用PWM信号とは別に、FET駆動用PWM信号を別に生成し高速で安定した周波数のPWMで制御するモータコントローラもあります。
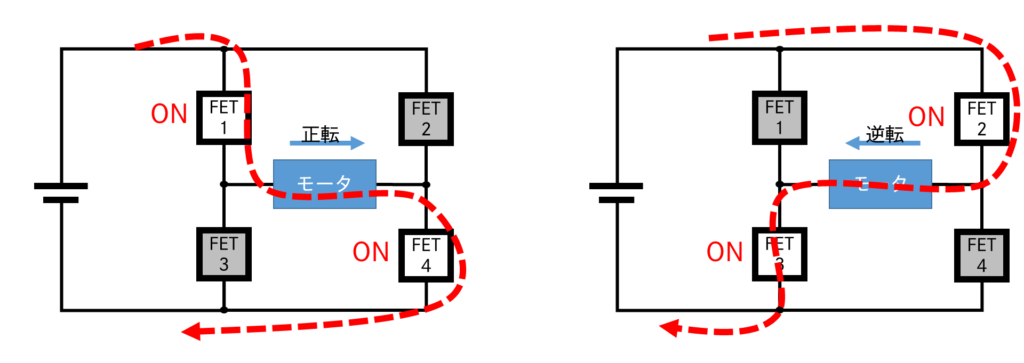
電流はつぎの図のように流れます。
つぎの図は、正転と逆転の変化がない状態(定常状態)で正転しているモータに流れる電流の変化を表しています。モータに流れる電流の形はSMのものと同様です。
ただし、回路に流れる電流は、モータに加える電圧の方向を切り替えているため、電流が負になる場合があります。
負の電流はバッテリやバッテリに接続されたコンデンサに流れます。コンデンサが接続されていない場合は、この電流がバッテリに流れる危険があります。
特徴
常に何かしらの電圧を加えているため電力消費が大きいです。しかし、停止状態でも電圧を印加しているため、急停止や急発進などにもよく対応でき、制御性が良いです。ただし、1つのPWM信号で方向まで指定するため、PWMの分解能はSM方式に比べて劣ります。
モータドライバの電源投入時にPWM信号がなければモータは正転か逆転に全速で回転します。PWM信号が必ず先に出力されるようにモータドライバを設定するなど、回路のシステムにも注意する必要があります。
また、正転と逆転を非常に高い周波数で繰り返します。FETのスイッチングに高い信頼性が無ければモータドライバはすぐに故障してしまいます。
正転と逆転を繰り返すという方式ですので、電流連続モードでモータを駆動させる必要があります。電流不連続モードで駆動させると、正転と逆転の信号が機械的な現象として現れ、停止時に振動したり、無負荷でも大きな電流が流れてしまいます。
まとめ
SM方式は必要なときだけ電流を流すので電力効率がよく、また破損の可能性が低いです。また、モータドライバの電源投入時にモータが回転しないため、安全です。
LAP方式は制御性が良い反面、常に電流を流すため電力効率が悪いです。また、電流連続モードに限定されるので、PWM周波数など、設計を確かに行う必要があります。電流の流し方などからもSMより破損の可能性は高いです。
| SM方式 | LAP方式 | |
|---|---|---|
| 電力消費 | 小さい | 大きい |
| 制御性 | 普通 | 高い |
| 破損の可能性 | 低い | 高い |
| 安全性 | 普通 | 低い |
| PWM分解能 | 普通 | SM方式の半分 |