
2020年1月24日
Pololu Raspberry Pi対応デュアルG2ハイパワーモータドライバ
この製品は、ラズベリーパイに取付けてDCモータを2台制御できる高出力モータードライバーです。Raspberry Piの40ピンコネクタに装着するHAT拡張ボードになっているため、配線も簡単ですぐにモータを制御できます。
モータ制御のプログラミングは、pythonライブラリが提供されており、簡単にDCモーターを制御できるようになっています。
4種類のボード(18v22, 18v18, 24v18, 24v14)があり、それぞれで制御できる電圧や電流のスペックが異なります。
| 18v22 | 18v18 | 24v18 | 24v14 | |
|---|---|---|---|---|
| 絶対最大入力電圧[V] | 30 | 30 | 36 | 36 |
| 最大定格入力電圧[V] | 18 | 18 | 28 | 28 |
| 最大連続電流[A] | 22 | 18 | 18 | 14 |
| 標準遮断電流[A] | 60 | 50 | 50 | 40 |
| パーツキット型番 | 3754 [suzaku-shop code=’pololu-3754′] | 3750 [suzaku-shop code=’pololu-3750′] | 3756 [suzaku-shop code=’pololu-3756′] | 3752 [suzaku-shop code=’pololu-3752′] |
| 実装済型番 | – | 3751 [suzaku-shop code=’pololu-3751′] | – | 3753 [suzaku-shop code=’pololu-3753′] |
[itemlink post_id=”238″]
- 対応ラズベリーパイ
- Raspberry Pi 1 Model A+
- Raspberry Pi 1 Model B+
- Raspberry Pi 2 シリーズ
- Raspberry Pi 3 シリーズ
- つぎのラズベリーパイでは使用できません。
- Raspberry Pi 1 Model A(販売終了)
- Raspberry Pi 1 Model B(販売終了)
- Raspberry Pi Zero シリーズ
- Compute Module シリーズ
使用前の準備
Pololu提供のPythonライブラリを使用することで簡単に制御できますので、Pythonの動作環境を準備します。
ライブラリの準備
Python pipをインストール
sudo apt-get install python-dev python-pip
GPIO制御用ライブラリをインストール
sudo pip install wiringpi
sudo pip3 install wiringpi
モータードライバーのPololuライブラリをインストール
PololuのGithubサイトからcloneして、ライブラリをインストールします。
git clone https://github.com/pololu/dual-g2-high-power-motor-driver-rpi cd dual-g2-high-power-motor-driver-rpi sudo python setup.py install
git clone https://github.com/pololu/dual-g2-high-power-motor-driver-rpi cd dual-g2-high-power-motor-driver-rpi sudo python3 setup.py install
ハードウェアの準備
Raspberry Piへの取付け
- パーツキットの場合は、ヘッダピンや端子台をはんだ付けします。
- Raspberry Piとの接続に、付属のスペーサを必ず取り付けてください。端子の足がラズパイの金属部分に触れると短絡し、故障の原因になります。
電源と配線
図のように、バッテリーとモータを接続します。
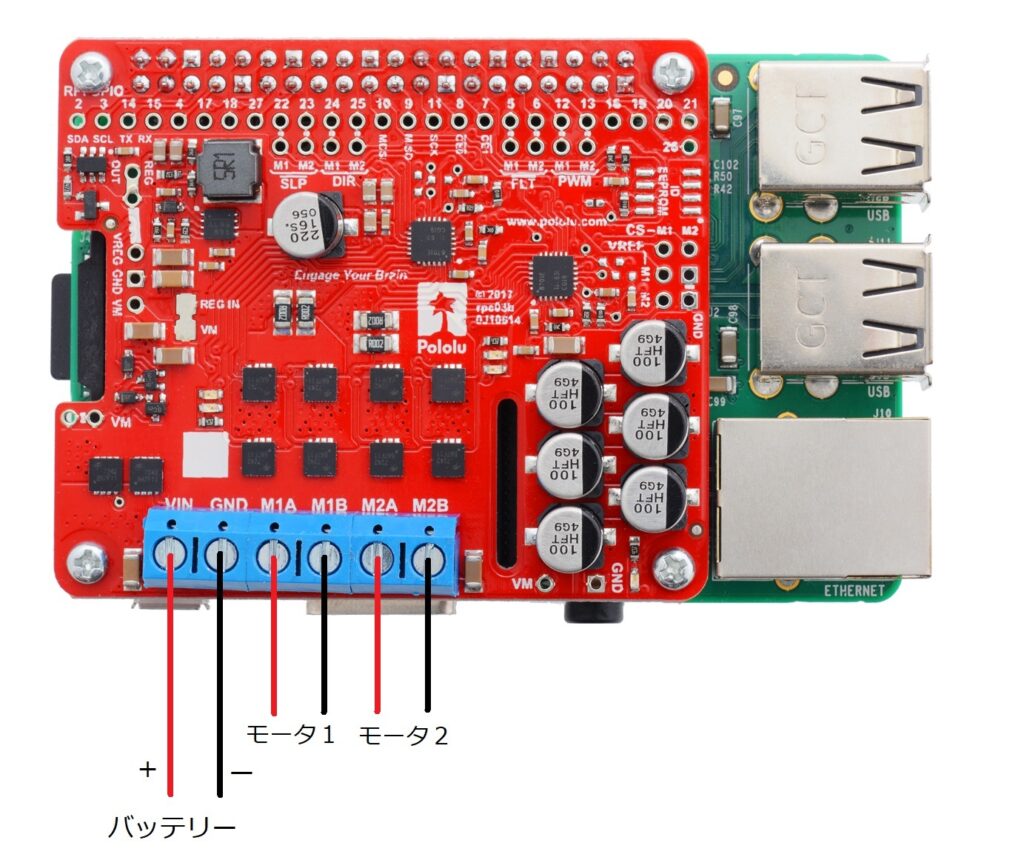
電源の逆接続保護がついているため、+とーを逆に接続しても壊れません。電源を逆接続した場合は、動作もしませんので、正しく接続し直して使用してください。
接続したバッテリーから、Raspberry Piへ5V 最大2.5Aが供給されるため、Raspberry Piへ別電源で供給する必要がありません。別電源から供給したい場合は、配線をカットすることで電源レギュレータを切ることもできます。詳細は製品ページをご確認ください。
モータを動かす
Pololuのサンプルコードを動かします。
ライブラリの準備の時にGithubからcloneした中にあるexample.pyを使用します。ディレクトリの位置が dual-g2-high-power-motor-driver-rpi であることを確認し、次のコマンドでサンプルコードを実行できます。
sudo python example.py
sudo python3 example.py
実行すると、モータ1、モータ2の順に
正転→停止→逆転→停止
といった動きをします。
example.pyのコードは次のように基本的な動作が書かれています。他の関数はPololu GithubのLibrary Referenceを確認してください。
from __future__ import print_function
import time
from dual_g2_hpmd_rpi import motors, MAX_SPEED
# モーター速度設定
test_forward_speeds = list(range(0, MAX_SPEED, 1)) + \
[MAX_SPEED] * 200 + list(range(MAX_SPEED, 0, -1)) + [0]
test_reverse_speeds = list(range(0, -MAX_SPEED, -1)) + \
[-MAX_SPEED] * 200 + list(range(-MAX_SPEED, 0, 1)) + [0]
try:
motors.enable()
motors.setSpeeds(0, 0)
print("Motor 1 forward")
for s in test_forward_speeds:
motors.motor1.setSpeed(s)
time.sleep(0.005)
print("Motor 1 reverse")
for s in test_reverse_speeds:
motors.motor1.setSpeed(s)
time.sleep(0.005)
print("Motor 2 forward")
for s in test_forward_speeds:
motors.motor2.setSpeed(s)
time.sleep(0.005)
print("Motor 2 reverse")
for s in test_reverse_speeds:
motors.motor2.setSpeed(s)
time.sleep(0.005)
finally:
# 例外やCtrl+Cでプロセスを強制終了時にモーターを停止
motors.setSpeeds(0, 0)
motors.disable()
Libraryリファレンス概要
このライブラリは、超音波領域の20kHz PWMでモータを制御します。
モータ速度は、-480~480の範囲で設定し、速度0が停止ブレーキになります。速度がプラスの値はM1A/M2AからM1B/M2Bへ電流が流れ、マイナスの値は逆に流れます。
ライブラリを次の行でPythonプログラムへインポートできます。
from dual_g2_hpmd_rpi import motors, MAX_SPEED
ライブラリをインポートして後に、次の関数でモータを有効にしてモータを制御できます。
- motors.enable() : モーター1とモーター2を有効
- motors.motor1.enable() : モーター1を有効
- motors.motor2.enable() : モーター2を有効
- motors.disable() : モーター1とモーター2を無効
- motors.motor1.disable() : モーター1を無効
- motors.motor2.disable() : モーター2を無効
- motors.setSpeeds(m1_speed, m2_speed) : モーター1とモーター2の速度と回転方向設定(-480~480)
- motors.motor1.setSpeed(speed) : モーター1の速度と回転方向設定(-480~480)
- motors.motor2.setSpeed(speed) : モーター2の速度と回転方向設定(-480~480)
このライブラリが提供する全てのオブジェクトで、定数 MAX_SPEED (480に等しい)を使用できます。上記のようにインポートした場合は、MAX_SPEEDと書くことで直接アクセスできます。次のようにアクセスすることもできます。
- motors.MAX_SPEED
- motors.motor1.MAX_SPEED
- motors.motor2.MAX_SPEED
複数のモータードライバを使用している場合は、import dual_g2_hpmd_rpi を使用してインポートすることをおすすめします。この場合には、上記の関数の前に、dual_g2_hpmd_rpi を付ける必要があります。
参考サイト
- 朱雀技研製品ページ 18v18 18v22 24v14 24v18
- Pololu Dual G2 High-Power Motor Driver for Raspberry Pi 一覧
- Python library for the Pololu Dual G2 High Power Motor Drivers for Raspberry Pi
[itemlink post_id=”240″]
[itemlink post_id=”242″]
[itemlink post_id=”241″]
[itemlink post_id=”243″]